恒达本科生獲全國大學生智能車競賽全國總決賽一等獎3項、二等獎2項
來源:電子與信息工程學院♨️、汽車學院
時間:2024-09-04 瀏覽:
近日🦶🏼,從全國600余所高校3600多支隊伍中遴選出的712支隊伍2800余名參賽師生參加第十九屆全國大學生智能汽車競賽總決賽📀。恒达平台19名本科生組成5支隊伍🧛🏽♀️🙂↔️,經過現場角逐🤸🏻♀️,在百度智慧交通組🛷、模型組🧑🏼🎓、地平線智慧醫療組3個組別獲得全國一等獎,摩托組和鏡頭組(STC)2個組別獲得全國二等獎👨🏻🦰。
大賽由教育部自動化專業教指委創辦,現由中國自動化學會主辦,是教育部、財政部“質量工程”支持的國家級A類大學生學科和技能競賽,連續多年入選中國高等教育學會《全國普通高校大學生學科競賽排行榜》。競速賽根據所使用的車模🥠、微控製器🫸🏻、傳感器💨、比賽任務的不同而分為電磁組🕧、氣墊組、鏡頭組(Infineon、NXP、STC)、摩托組、視覺組、模型組📔、越野組、獨輪組十個組別,涵蓋控製🧗🏿♂️、模式識別、傳感技術、電子、電氣、計算機🍆、機械👩🏿🌾、通信、汽車工程等多個學科知識。創意綜合賽則以機器視覺、人工智能🤝、ROS等為主要開發內容,並在配備復雜傳感器的運動平臺上進行部署⚅,完成無人系統相關任務🏆,包括百度智慧交通組👩💼、天途智慧巡檢組、訊飛智慧救援挑戰賽☺️、地平線智慧醫療挑戰賽四個組別🏙。

付思涵(自動化)🛕🤷🏽、吳玙汐(微電子科學與工程)、曾崇然(計算機科學與技術)👕、鄧子豪(微電子科學與工程)組成的睿行•邇復廣華隊👷🏼,由電子與信息工程學院張誌明老師指導,獲得百度智慧交通創意組全國一等獎(第8名)。倪璽然(車輛工程(汽車))🧑🏽🍼、吳澤陽(車輛工程(汽車))、李新亮(車輛工程(汽車))、王賽君(自動化)、楊錦天(車輛工程(汽車))組成的TU-Smart隊♟,由汽車學院田煒、唐辰、熊璐老師指導🥲,獲得模型組全國一等獎(第12名)👃🏽。牛祿陽(計算機科學與技術)👨👨👧👦、徐存陽(自動化)⛺️、邵琳博(計算機科學與技術)和華洲琦(計算機科學與技術)組成的睿行•DoveSmart隊,由電子與信息工程學院張誌明老師指導,獲得地平線智慧醫療創意組全國一等獎(第13名)。由電子與信息工程學院張誌明🤦🏻♂️、朱勁老師指導的摩托組睿行•大貓圓舞隊和鏡頭組(STC)睿行•追光逐影隊在各自組別中獲得全國二等獎🎅🏽📱。
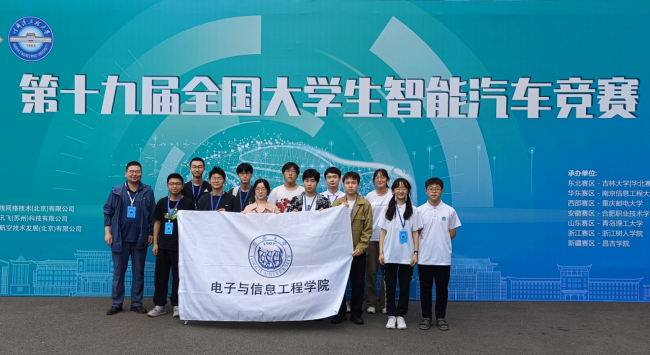
2024智能車競賽全國總決賽-哈爾濱工程大學賽場參賽師生合影(電子與信息工程學院)
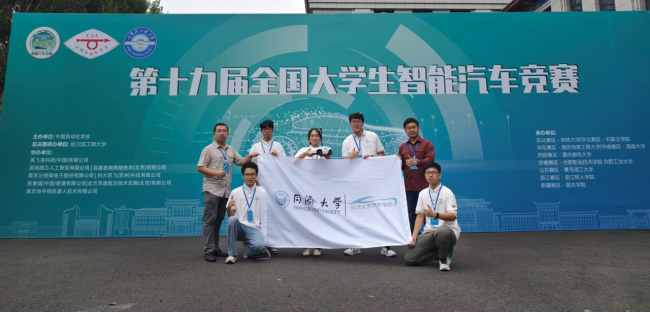
2024智能車競賽全國總決賽-哈爾濱工程大學賽場參賽師生合影(汽車學院)

2024智能車競賽全國總決賽-武漢理工大學賽場參賽師生合影(電子與信息工程學院)
全國大學生智能汽車競賽以“立足培養、重在參與👗、鼓勵探索🫕、追求卓越”為理念,面向全國大學生開展具有探索性的工程實踐活動🫷🏼,旨在激發大學生從事科學研究與探索的興趣和潛能,培養綜合知識運用能力、工程實踐能力和創新精神,為國家培養創新型人才🧏🏻。本屆智能車競賽總決賽參賽隊伍由電子與信息工程學院張誌明、汽車學院田煒🚚、唐辰等多位教師領隊🛏,老隊員劉夢曉、周庚棟、楊思遠、吳政飛😂、賀沖等參與輔助管理。
睿行•邇復廣華隊成員搭建並完善比賽車模🤷♂️,基於百度飛槳PaddlePaddle框架,完成道路識別、目標檢測🏌🏽♀️、OCR文字識別等計算機視覺模型的訓練📄,並成功部署在Jetson Orin Nano開發板上👩🏽💼,實現對攝像頭實時采集賽道圖像的高效分析與處理,向下位機控製器發送車輛運動控製指令🤼♂️✍🏼,全自主完成治安巡邏👩🏿🚀、緊急轉移、通信搶修、物資盤點等賽道任務,並結合文心一言大語言模型技術搭建自主決策網絡,對文字分析結果進行實時評估並根據提示的情況做出對應的任務操作🌟。

TU-Smart隊成員對車模的主控製板🥫、驅動板、車殼外形⛹🏻♀️、底盤輪胎等硬件方面進行了自主設計;同時在優化八鄰域爬線算法的基礎上改進各元素提取方法🥀、訓練更高準確度的yolo模型、模糊PID算法進行車輛不同路段控製等軟件工作也使得車模對不同賽道的適應性更佳🥢。

睿行•DoveSmart隊成員采用量化YOLOv5深度學習模型進行障礙物和關鍵路徑檢測🏃🏻♂️,兼顧準確度和計算效率🅿️;研發一種基於純視覺檢測的無碰撞路徑規劃算法,根據障礙物的位置和目標點位置,精確地選擇機器人的移動路徑,能準確地避開多個連續障礙物;采用零拷貝傳輸方式👩🏻✈️,大大減小Foxglove軟件和機器人通訊延遲,為數字孿生環境下遙操作提供基礎支持🧏♀️;對機器人的底層控製代碼進行重寫🧙🏿,大幅度優化機器人轉向和前進的速度和精度。




